Bioinspired SMA based Actuator
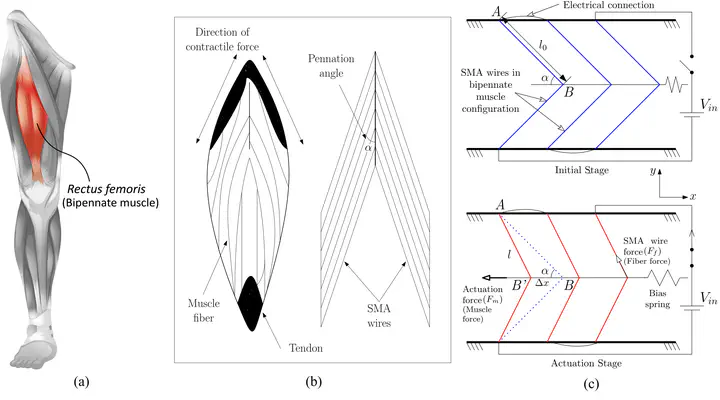 Bipenniform Muscle Inspiration
Bipenniform Muscle InspirationObjectives
| Project Milestones | |
|---|---|
| - | Design and development of scalable and modular shape memory alloy (SMA) based novel actuation mechanism based on bipennate muscle architecture for fast cyclic applications |
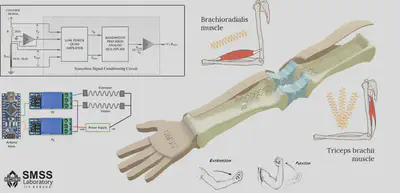
| - | Active feedback system using SMA as a self-sensing element based on LSTM (Long short-term memory) based-RL (Reinforcement Learning) control architecture |
| - | Integration of evaporative cooling method for obtaining high actuation frequency of SMA-based agonist-antagonistic system |
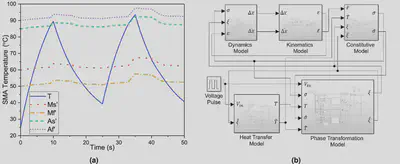
| - | Analytical modelling and simulation of the actuation system, design optimization and experimental validation of the model |
Bioinspired SMA based Artifical Muscle - Poster
Peer-reviewed Article
(2022).
Design and development of non-magnetic hierarchical actuator powered by shape memory alloy based bipennate muscle.
Scientific Reports.
Patents
(2022).
Bipennate Muscle Architecture-based Shape Memory Alloy Embedded Hierarchical Actuator.
Patent Number - 414106.
(2021).
An Actuator for a Valve.
Application Number - PCT/US2022/041899.
International Conference
(2023).
Design and development of novel rotary actuation system based on shape memory alloy springs driven mechanism arranged in bipennate muscle architecture.
Active and Passive Smart Structures and Integrated Systems XVII.